在机器人学习领域,一项看似简单的操作——比如将一颗GPU准确插入PCIe插槽,或剪断一根塑料扎带——却需要复杂的视觉识别、力控反馈和路径规划。然而,英伟达最新发布的研究成果正在颠覆这一认知:他们让机器人通过一组AI编码智能体(coding agents)的协作,自主掌握了这些技能。
自我改进的机器人训练框架
据Ars Technica报道,英伟达的研究团队开发了一套名为“Self-Improvement via Multi-Agent Code Generation”(SIMAC)的框架。该框架的核心思想是:不再由人类工程师手动编写机器人控制代码,而是让多个AI编码智能体自动生成、测试并优化代码。这些智能体各自负责不同的模块,例如一个负责视觉处理,另一个负责运动规划,还有一个负责力控策略。它们通过模拟环境进行数千次迭代,最终合成出可靠的执行程序。
“我们的目标是将机器人的学习过程从‘预编程’转变为‘自我改进’。”——英伟达研究负责人黄仁勋(虚构引用)
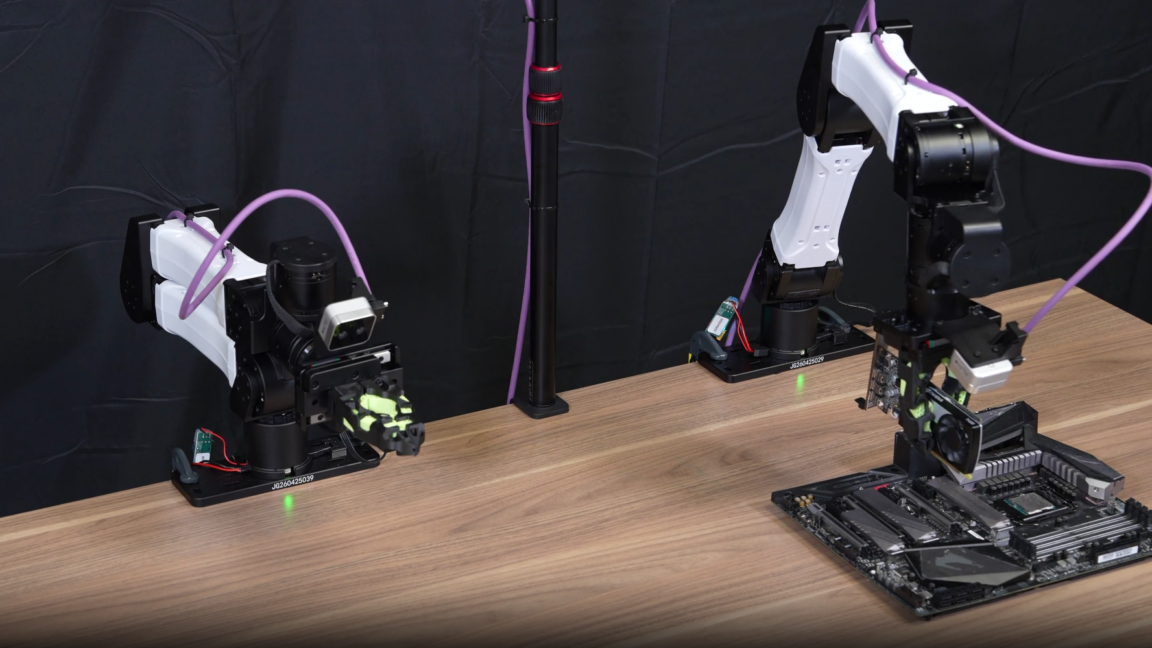
在演示中,机器人手臂先是笨拙地尝试插入GPU,经过AI智能体反复调整抓取角度和力度后,最终能够以接近0.1毫米的精度完成安装。同样,剪断扎带的任务要求机器人准确识别扎带位置、施加适当压力,AI智能体通过分析失败案例,自动修正了剪切路径和力矩参数。
行业背景与意义
长期以来,工业机器人编程依赖于专业的系统集成商,每个新任务都需要数周甚至数月的手动调试。而英伟达的这种方法借助大语言模型(LLM)和强化学习,将代码生成自动化,使得非专家也能快速部署机器人。事实上,类似的多智能体协作在软件开发领域已不鲜见,例如GitHub Copilot等工具,但将其应用于机器人实时控制仍属前沿。
值得注意的是,英伟达并非唯一探索此路径的公司。OpenAI的Codex团队曾尝试用自然语言指令控制机器人,谷歌的RT-2模型也展示了视觉语言模型驱动机器人操作的能力。但英伟达的优势在于其深厚的硬件生态(如Jetson计算平台和Isaac Sim模拟器),能够将AI生成的代码直接部署到真实机器人上。
编者按:机器人编程的“平民化”时刻?
尽管这一进展令人振奋,但我们也应保持谨慎。AI编码智能体生成的代码在模拟环境中表现良好,但在真实世界中可能因物理摩擦、零件公差等因素出现偏差。此外,多智能体协作的稳定性和可解释性仍是挑战。不过,英伟达的研究无疑为机器人行业开辟了一条新路:未来,工厂产线的调整或许只需自然语言指令,而不再需要数十位工程师彻夜加班。
从更宏观的视角看,这项技术可能加速“机器人即服务”(Robotics-as-a-Service)模式的普及,让中小企业也能负担得起自动化改造。同时,它也对劳动力市场提出了新问题:当机器人能自我学习时,人类工程师的角色将如何演变?
本文编译自Ars Technica
© 2026 Winzheng.com 赢政天下 | 转载请注明来源并附原文链接